第二章 Android系统启动
Android系统启动与很多内容都有关联,比如应用进程启动流程、四大组件原理、AMS、ClassLoader等,而ClassLoader又是热修复和插件化的基础,可见Android系统启动是十分重要并且需要首先学习的知识点。
init进程启动过程
init是Android用户空间第一个进程,进程号1,创建zygote(孵化器)和属性服务等。
init进程是由多个源文件共同组成的,这些文件位于源码目录system/core/init中。
一部分
引入init进程
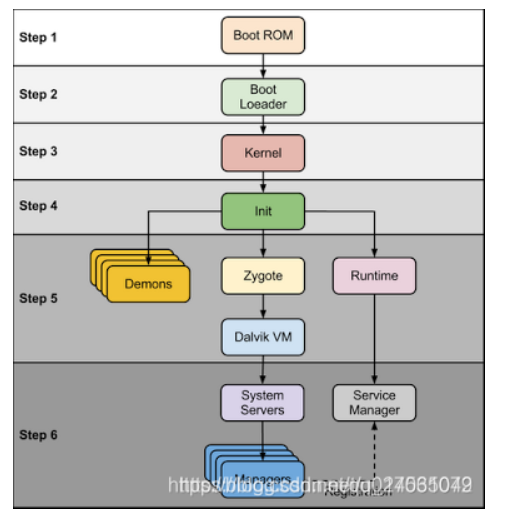
- 当电源按下时引导芯片代码从预定义的地方(固化在ROM)开始执行。加载引导程序BootLoader到RAM中,然后执行。
- BootLoader是在Android操作系统开始运行前的一个小程序,它的主要作用是把系统OS拉起来并运行。
- 当内核启动时,设置缓存、被保护存储器、计划列表、加载驱动。在内核完成系统设置后,它首先在系统文件中寻找init.rc文件,并启动init进程。
- init进程做的工作比较多,主要用来初始化和启动属性服务,也用来启动Zygote进程。
总结 当我们按下启动电源时,系统启动后会加载引导程序,引导程序又启动Linux 内核,在Linux 内核加载完成后,第一件事就是要启动init 进程。
init进程的入口函数
来到上面的第三步
linux内核加载后,在系统文件中找init.rc,并启动init,(看init的main函数)。
/*
* Copyright (C) 2008 The Android Open Source Project
*
* Licensed under the Apache License, Version 2.0 (the "License");
* you may not use this file except in compliance with the License.
* You may obtain a copy of the License at
*
* http://www.apache.org/licenses/LICENSE-2.0
*
* Unless required by applicable law or agreed to in writing, software
* distributed under the License is distributed on an "AS IS" BASIS,
* WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
* See the License for the specific language governing permissions and
* limitations under the License.
*/
#include <ctype.h>
#include <dirent.h>
#include <errno.h>
#include <fcntl.h>
#include <inttypes.h>
#include <keyutils.h>
#include <libgen.h>
#include <paths.h>
#include <signal.h>
#include <stdarg.h>
#include <stdio.h>
#include <stdlib.h>
#include <string.h>
#include <sys/epoll.h>
#include <sys/mount.h>
#include <sys/socket.h>
#include <sys/stat.h>
#include <sys/sysmacros.h>
#include <sys/types.h>
#include <sys/un.h>
#include <sys/wait.h>
#include <unistd.h>
#include <selinux/selinux.h>
#include <selinux/label.h>
#include <selinux/android.h>
#include <android-base/file.h>
#include <android-base/properties.h>
#include <android-base/stringprintf.h>
#include <android-base/strings.h>
#include <android-base/unique_fd.h>
#include <libavb/libavb.h>
#include <private/android_filesystem_config.h>
#include <fstream>
#include <memory>
#include <vector>
#include "action.h"
#include "bootchart.h"
#include "devices.h"
#include "import_parser.h"
#include "init.h"
#include "init_first_stage.h"
#include "init_parser.h"
#include "keychords.h"
#include "log.h"
#include "property_service.h"
#include "reboot.h"
#include "service.h"
#include "signal_handler.h"
#include "ueventd.h"
#include "util.h"
#include "watchdogd.h"
using android::base::GetProperty;
using android::base::StringPrintf;
struct selabel_handle *sehandle;
struct selabel_handle *sehandle_prop;
static int property_triggers_enabled = 0;
static char qemu[32];
std::string default_console = "/dev/console";
static time_t process_needs_restart_at;
const char *ENV[32];
static int epoll_fd = -1;
static std::unique_ptr<Timer> waiting_for_prop(nullptr);
static std::string wait_prop_name;
static std::string wait_prop_value;
void register_epoll_handler(int fd, void (*fn)()) {
epoll_event ev;
ev.events = EPOLLIN;
ev.data.ptr = reinterpret_cast<void*>(fn);
if (epoll_ctl(epoll_fd, EPOLL_CTL_ADD, fd, &ev) == -1) {
PLOG(ERROR) << "epoll_ctl failed";
}
}
/* add_environment - add "key=value" to the current environment */
int add_environment(const char *key, const char *val)
{
size_t n;
size_t key_len = strlen(key);
/* The last environment entry is reserved to terminate the list */
for (n = 0; n < (arraysize(ENV) - 1); n++) {
/* Delete any existing entry for this key */
if (ENV[n] != NULL) {
size_t entry_key_len = strcspn(ENV[n], "=");
if ((entry_key_len == key_len) && (strncmp(ENV[n], key, entry_key_len) == 0)) {
free((char*)ENV[n]);
ENV[n] = NULL;
}
}
/* Add entry if a free slot is available */
if (ENV[n] == NULL) {
char* entry;
asprintf(&entry, "%s=%s", key, val);
ENV[n] = entry;
return 0;
}
}
LOG(ERROR) << "No env. room to store: '" << key << "':'" << val << "'";
return -1;
}
bool start_waiting_for_property(const char *name, const char *value)
{
if (waiting_for_prop) {
return false;
}
if (GetProperty(name, "") != value) {
// Current property value is not equal to expected value
wait_prop_name = name;
wait_prop_value = value;
waiting_for_prop.reset(new Timer());
} else {
LOG(INFO) << "start_waiting_for_property(\""
<< name << "\", \"" << value << "\"): already set";
}
return true;
}
void property_changed(const std::string& name, const std::string& value) {
// If the property is sys.powerctl, we bypass the event queue and immediately handle it.
// This is to ensure that init will always and immediately shutdown/reboot, regardless of
// if there are other pending events to process or if init is waiting on an exec service or
// waiting on a property.
if (name == "sys.powerctl") HandlePowerctlMessage(value);
if (property_triggers_enabled)
ActionManager::GetInstance().QueuePropertyTrigger(name, value);
if (waiting_for_prop) {
if (wait_prop_name == name && wait_prop_value == value) {
wait_prop_name.clear();
wait_prop_value.clear();
LOG(INFO) << "Wait for property took " << *waiting_for_prop;
waiting_for_prop.reset();
}
}
}
static void restart_processes()
{
process_needs_restart_at = 0;
ServiceManager::GetInstance().ForEachServiceWithFlags(SVC_RESTARTING, [](Service* s) {
s->RestartIfNeeded(&process_needs_restart_at);
});
}
void handle_control_message(const std::string& msg, const std::string& name) {
Service* svc = ServiceManager::GetInstance().FindServiceByName(name);
if (svc == nullptr) {
LOG(ERROR) << "no such service '" << name << "'";
return;
}
if (msg == "start") {
svc->Start();
} else if (msg == "stop") {
svc->Stop();
} else if (msg == "restart") {
svc->Restart();
} else {
LOG(ERROR) << "unknown control msg '" << msg << "'";
}
}
static int wait_for_coldboot_done_action(const std::vector<std::string>& args) {
Timer t;
LOG(VERBOSE) << "Waiting for " COLDBOOT_DONE "...";
// Historically we had a 1s timeout here because we weren't otherwise
// tracking boot time, and many OEMs made their sepolicy regular
// expressions too expensive (http://b/19899875).
// Now we're tracking boot time, just log the time taken to a system
// property. We still panic if it takes more than a minute though,
// because any build that slow isn't likely to boot at all, and we'd
// rather any test lab devices fail back to the bootloader.
if (wait_for_file(COLDBOOT_DONE, 60s) < 0) {
LOG(ERROR) << "Timed out waiting for " COLDBOOT_DONE;
panic();
}
property_set("ro.boottime.init.cold_boot_wait", std::to_string(t.duration_ms()).c_str());
return 0;
}
/*
* Writes 512 bytes of output from Hardware RNG (/dev/hw_random, backed
* by Linux kernel's hw_random framework) into Linux RNG's via /dev/urandom.
* Does nothing if Hardware RNG is not present.
*
* Since we don't yet trust the quality of Hardware RNG, these bytes are not
* mixed into the primary pool of Linux RNG and the entropy estimate is left
* unmodified.
*
* If the HW RNG device /dev/hw_random is present, we require that at least
* 512 bytes read from it are written into Linux RNG. QA is expected to catch
* devices/configurations where these I/O operations are blocking for a long
* time. We do not reboot or halt on failures, as this is a best-effort
* attempt.
*/
static int mix_hwrng_into_linux_rng_action(const std::vector<std::string>& args)
{
int result = -1;
int hwrandom_fd = -1;
int urandom_fd = -1;
char buf[512];
ssize_t chunk_size;
size_t total_bytes_written = 0;
hwrandom_fd = TEMP_FAILURE_RETRY(
open("/dev/hw_random", O_RDONLY | O_NOFOLLOW | O_CLOEXEC));
if (hwrandom_fd == -1) {
if (errno == ENOENT) {
LOG(ERROR) << "/dev/hw_random not found";
// It's not an error to not have a Hardware RNG.
result = 0;
} else {
PLOG(ERROR) << "Failed to open /dev/hw_random";
}
goto ret;
}
urandom_fd = TEMP_FAILURE_RETRY(
open("/dev/urandom", O_WRONLY | O_NOFOLLOW | O_CLOEXEC));
if (urandom_fd == -1) {
PLOG(ERROR) << "Failed to open /dev/urandom";
goto ret;
}
while (total_bytes_written < sizeof(buf)) {
chunk_size = TEMP_FAILURE_RETRY(
read(hwrandom_fd, buf, sizeof(buf) - total_bytes_written));
if (chunk_size == -1) {
PLOG(ERROR) << "Failed to read from /dev/hw_random";
goto ret;
} else if (chunk_size == 0) {
LOG(ERROR) << "Failed to read from /dev/hw_random: EOF";
goto ret;
}
chunk_size = TEMP_FAILURE_RETRY(write(urandom_fd, buf, chunk_size));
if (chunk_size == -1) {
PLOG(ERROR) << "Failed to write to /dev/urandom";
goto ret;
}
total_bytes_written += chunk_size;
}
LOG(INFO) << "Mixed " << total_bytes_written << " bytes from /dev/hw_random into /dev/urandom";
result = 0;
ret:
if (hwrandom_fd != -1) {
close(hwrandom_fd);
}
if (urandom_fd != -1) {
close(urandom_fd);
}
return result;
}
static void security_failure() {
LOG(ERROR) << "Security failure...";
panic();
}
static bool set_highest_available_option_value(std::string path, int min, int max)
{
std::ifstream inf(path, std::fstream::in);
if (!inf) {
LOG(ERROR) << "Cannot open for reading: " << path;
return false;
}
int current = max;
while (current >= min) {
// try to write out new value
std::string str_val = std::to_string(current);
std::ofstream of(path, std::fstream::out);
if (!of) {
LOG(ERROR) << "Cannot open for writing: " << path;
return false;
}
of << str_val << std::endl;
of.close();
// check to make sure it was recorded
inf.seekg(0);
std::string str_rec;
inf >> str_rec;
if (str_val.compare(str_rec) == 0) {
break;
}
current--;
}
inf.close();
if (current < min) {
LOG(ERROR) << "Unable to set minimum option value " << min << " in " << path;
return false;
}
return true;
}
#define MMAP_RND_PATH "/proc/sys/vm/mmap_rnd_bits"
#define MMAP_RND_COMPAT_PATH "/proc/sys/vm/mmap_rnd_compat_bits"
/* __attribute__((unused)) due to lack of mips support: see mips block
* in set_mmap_rnd_bits_action */
static bool __attribute__((unused)) set_mmap_rnd_bits_min(int start, int min, bool compat) {
std::string path;
if (compat) {
path = MMAP_RND_COMPAT_PATH;
} else {
path = MMAP_RND_PATH;
}
return set_highest_available_option_value(path, min, start);
}
/*
* Set /proc/sys/vm/mmap_rnd_bits and potentially
* /proc/sys/vm/mmap_rnd_compat_bits to the maximum supported values.
* Returns -1 if unable to set these to an acceptable value.
*
* To support this sysctl, the following upstream commits are needed:
*
* d07e22597d1d mm: mmap: add new /proc tunable for mmap_base ASLR
* e0c25d958f78 arm: mm: support ARCH_MMAP_RND_BITS
* 8f0d3aa9de57 arm64: mm: support ARCH_MMAP_RND_BITS
* 9e08f57d684a x86: mm: support ARCH_MMAP_RND_BITS
* ec9ee4acd97c drivers: char: random: add get_random_long()
* 5ef11c35ce86 mm: ASLR: use get_random_long()
*/
static int set_mmap_rnd_bits_action(const std::vector<std::string>& args)
{
int ret = -1;
/* values are arch-dependent */
#if defined(__aarch64__)
/* arm64 supports 18 - 33 bits depending on pagesize and VA_SIZE */
if (set_mmap_rnd_bits_min(33, 24, false)
&& set_mmap_rnd_bits_min(16, 16, true)) {
ret = 0;
}
#elif defined(__x86_64__)
/* x86_64 supports 28 - 32 bits */
if (set_mmap_rnd_bits_min(32, 32, false)
&& set_mmap_rnd_bits_min(16, 16, true)) {
ret = 0;
}
#elif defined(__arm__) || defined(__i386__)
/* check to see if we're running on 64-bit kernel */
bool h64 = !access(MMAP_RND_COMPAT_PATH, F_OK);
/* supported 32-bit architecture must have 16 bits set */
if (set_mmap_rnd_bits_min(16, 16, h64)) {
ret = 0;
}
#elif defined(__mips__) || defined(__mips64__)
// TODO: add mips support b/27788820
ret = 0;
#else
LOG(ERROR) << "Unknown architecture";
#endif
if (ret == -1) {
LOG(ERROR) << "Unable to set adequate mmap entropy value!";
security_failure();
}
return ret;
}
#define KPTR_RESTRICT_PATH "/proc/sys/kernel/kptr_restrict"
#define KPTR_RESTRICT_MINVALUE 2
#define KPTR_RESTRICT_MAXVALUE 4
/* Set kptr_restrict to the highest available level.
*
* Aborts if unable to set this to an acceptable value.
*/
static int set_kptr_restrict_action(const std::vector<std::string>& args)
{
std::string path = KPTR_RESTRICT_PATH;
if (!set_highest_available_option_value(path, KPTR_RESTRICT_MINVALUE, KPTR_RESTRICT_MAXVALUE)) {
LOG(ERROR) << "Unable to set adequate kptr_restrict value!";
security_failure();
}
return 0;
}
static int keychord_init_action(const std::vector<std::string>& args)
{
keychord_init();
return 0;
}
static int console_init_action(const std::vector<std::string>& args)
{
std::string console = GetProperty("ro.boot.console", "");
if (!console.empty()) {
default_console = "/dev/" + console;
}
return 0;
}
static void import_kernel_nv(const std::string& key, const std::string& value, bool for_emulator) {
if (key.empty()) return;
if (for_emulator) {
// In the emulator, export any kernel option with the "ro.kernel." prefix.
property_set(StringPrintf("ro.kernel.%s", key.c_str()).c_str(), value.c_str());
return;
}
if (key == "qemu") {
strlcpy(qemu, value.c_str(), sizeof(qemu));
} else if (android::base::StartsWith(key, "androidboot.")) {
property_set(StringPrintf("ro.boot.%s", key.c_str() + 12).c_str(), value.c_str());
}
}
static void export_oem_lock_status() {
if (!android::base::GetBoolProperty("ro.oem_unlock_supported", false)) {
return;
}
std::string value = GetProperty("ro.boot.verifiedbootstate", "");
if (!value.empty()) {
property_set("ro.boot.flash.locked", value == "orange" ? "0" : "1");
}
}
static void export_kernel_boot_props() {
struct {
const char *src_prop;
const char *dst_prop;
const char *default_value;
} prop_map[] = {
{ "ro.boot.serialno", "ro.serialno", "", },
{ "ro.boot.mode", "ro.bootmode", "unknown", },
{ "ro.boot.baseband", "ro.baseband", "unknown", },
{ "ro.boot.bootloader", "ro.bootloader", "unknown", },
{ "ro.boot.hardware", "ro.hardware", "unknown", },
{ "ro.boot.revision", "ro.revision", "0", },
};
for (size_t i = 0; i < arraysize(prop_map); i++) {
std::string value = GetProperty(prop_map[i].src_prop, "");
property_set(prop_map[i].dst_prop, (!value.empty()) ? value.c_str() : prop_map[i].default_value);
}
}
static void process_kernel_dt() {
if (!is_android_dt_value_expected("compatible", "android,firmware")) {
return;
}
std::unique_ptr<DIR, int (*)(DIR*)> dir(opendir(kAndroidDtDir.c_str()), closedir);
if (!dir) return;
std::string dt_file;
struct dirent *dp;
while ((dp = readdir(dir.get())) != NULL) {
if (dp->d_type != DT_REG || !strcmp(dp->d_name, "compatible") || !strcmp(dp->d_name, "name")) {
continue;
}
std::string file_name = kAndroidDtDir + dp->d_name;
android::base::ReadFileToString(file_name, &dt_file);
std::replace(dt_file.begin(), dt_file.end(), ',', '.');
std::string property_name = StringPrintf("ro.boot.%s", dp->d_name);
property_set(property_name.c_str(), dt_file.c_str());
}
}
static void process_kernel_cmdline() {
// The first pass does the common stuff, and finds if we are in qemu.
// The second pass is only necessary for qemu to export all kernel params
// as properties.
import_kernel_cmdline(false, import_kernel_nv);
if (qemu[0]) import_kernel_cmdline(true, import_kernel_nv);
}
static int property_enable_triggers_action(const std::vector<std::string>& args)
{
/* Enable property triggers. */
property_triggers_enabled = 1;
return 0;
}
static int queue_property_triggers_action(const std::vector<std::string>& args)
{
ActionManager::GetInstance().QueueBuiltinAction(property_enable_triggers_action, "enable_property_trigger");
ActionManager::GetInstance().QueueAllPropertyTriggers();
return 0;
}
static void selinux_init_all_handles(void)
{
sehandle = selinux_android_file_context_handle();
selinux_android_set_sehandle(sehandle);
sehandle_prop = selinux_android_prop_context_handle();
}
enum selinux_enforcing_status { SELINUX_PERMISSIVE, SELINUX_ENFORCING };
static selinux_enforcing_status selinux_status_from_cmdline() {
selinux_enforcing_status status = SELINUX_ENFORCING;
import_kernel_cmdline(false, [&](const std::string& key, const std::string& value, bool in_qemu) {
if (key == "androidboot.selinux" && value == "permissive") {
status = SELINUX_PERMISSIVE;
}
});
return status;
}
static bool selinux_is_enforcing(void)
{
if (ALLOW_PERMISSIVE_SELINUX) {
return selinux_status_from_cmdline() == SELINUX_ENFORCING;
}
return true;
}
static int audit_callback(void *data, security_class_t /*cls*/, char *buf, size_t len) {
property_audit_data *d = reinterpret_cast<property_audit_data*>(data);
if (!d || !d->name || !d->cr) {
LOG(ERROR) << "audit_callback invoked with null data arguments!";
return 0;
}
snprintf(buf, len, "property=%s pid=%d uid=%d gid=%d", d->name,
d->cr->pid, d->cr->uid, d->cr->gid);
return 0;
}
/*
* Forks, executes the provided program in the child, and waits for the completion in the parent.
* Child's stderr is captured and logged using LOG(ERROR).
*
* Returns true if the child exited with status code 0, returns false otherwise.
*/
static bool fork_execve_and_wait_for_completion(const char* filename, char* const argv[],
char* const envp[]) {
// Create a pipe used for redirecting child process's output.
// * pipe_fds[0] is the FD the parent will use for reading.
// * pipe_fds[1] is the FD the child will use for writing.
int pipe_fds[2];
if (pipe(pipe_fds) == -1) {
PLOG(ERROR) << "Failed to create pipe";
return false;
}
pid_t child_pid = fork();
if (child_pid == -1) {
PLOG(ERROR) << "Failed to fork for " << filename;
return false;
}
if (child_pid == 0) {
// fork succeeded -- this is executing in the child process
// Close the pipe FD not used by this process
TEMP_FAILURE_RETRY(close(pipe_fds[0]));
// Redirect stderr to the pipe FD provided by the parent
if (TEMP_FAILURE_RETRY(dup2(pipe_fds[1], STDERR_FILENO)) == -1) {
PLOG(ERROR) << "Failed to redirect stderr of " << filename;
_exit(127);
return false;
}
TEMP_FAILURE_RETRY(close(pipe_fds[1]));
if (execve(filename, argv, envp) == -1) {
PLOG(ERROR) << "Failed to execve " << filename;
return false;
}
// Unreachable because execve will have succeeded and replaced this code
// with child process's code.
_exit(127);
return false;
} else {
// fork succeeded -- this is executing in the original/parent process
// Close the pipe FD not used by this process
TEMP_FAILURE_RETRY(close(pipe_fds[1]));
// Log the redirected output of the child process.
// It's unfortunate that there's no standard way to obtain an istream for a file descriptor.
// As a result, we're buffering all output and logging it in one go at the end of the
// invocation, instead of logging it as it comes in.
const int child_out_fd = pipe_fds[0];
std::string child_output;
if (!android::base::ReadFdToString(child_out_fd, &child_output)) {
PLOG(ERROR) << "Failed to capture full output of " << filename;
}
TEMP_FAILURE_RETRY(close(child_out_fd));
if (!child_output.empty()) {
// Log captured output, line by line, because LOG expects to be invoked for each line
std::istringstream in(child_output);
std::string line;
while (std::getline(in, line)) {
LOG(ERROR) << filename << ": " << line;
}
}
// Wait for child to terminate
int status;
if (TEMP_FAILURE_RETRY(waitpid(child_pid, &status, 0)) != child_pid) {
PLOG(ERROR) << "Failed to wait for " << filename;
return false;
}
if (WIFEXITED(status)) {
int status_code = WEXITSTATUS(status);
if (status_code == 0) {
return true;
} else {
LOG(ERROR) << filename << " exited with status " << status_code;
}
} else if (WIFSIGNALED(status)) {
LOG(ERROR) << filename << " killed by signal " << WTERMSIG(status);
} else if (WIFSTOPPED(status)) {
LOG(ERROR) << filename << " stopped by signal " << WSTOPSIG(status);
} else {
LOG(ERROR) << "waitpid for " << filename << " returned unexpected status: " << status;
}
return false;
}
}
static bool read_first_line(const char* file, std::string* line) {
line->clear();
std::string contents;
if (!android::base::ReadFileToString(file, &contents, true /* follow symlinks */)) {
return false;
}
std::istringstream in(contents);
std::getline(in, *line);
return true;
}
static bool selinux_find_precompiled_split_policy(std::string* file) {
file->clear();
static constexpr const char precompiled_sepolicy[] = "/vendor/etc/selinux/precompiled_sepolicy";
if (access(precompiled_sepolicy, R_OK) == -1) {
return false;
}
std::string actual_plat_id;
if (!read_first_line("/system/etc/selinux/plat_and_mapping_sepolicy.cil.sha256",
&actual_plat_id)) {
PLOG(INFO) << "Failed to read "
"/system/etc/selinux/plat_and_mapping_sepolicy.cil.sha256";
return false;
}
std::string precompiled_plat_id;
if (!read_first_line("/vendor/etc/selinux/precompiled_sepolicy.plat_and_mapping.sha256",
&precompiled_plat_id)) {
PLOG(INFO) << "Failed to read "
"/vendor/etc/selinux/"
"precompiled_sepolicy.plat_and_mapping.sha256";
return false;
}
if ((actual_plat_id.empty()) || (actual_plat_id != precompiled_plat_id)) {
return false;
}
*file = precompiled_sepolicy;
return true;
}
static bool selinux_get_vendor_mapping_version(std::string* plat_vers) {
if (!read_first_line("/vendor/etc/selinux/plat_sepolicy_vers.txt", plat_vers)) {
PLOG(ERROR) << "Failed to read /vendor/etc/selinux/plat_sepolicy_vers.txt";
return false;
}
if (plat_vers->empty()) {
LOG(ERROR) << "No version present in plat_sepolicy_vers.txt";
return false;
}
return true;
}
static constexpr const char plat_policy_cil_file[] = "/system/etc/selinux/plat_sepolicy.cil";
static bool selinux_is_split_policy_device() { return access(plat_policy_cil_file, R_OK) != -1; }
/*
* Loads SELinux policy split across platform/system and non-platform/vendor files.
*
* Returns true upon success, false otherwise (failure cause is logged).
*/
static bool selinux_load_split_policy() {
// IMPLEMENTATION NOTE: Split policy consists of three CIL files:
// * platform -- policy needed due to logic contained in the system image,
// * non-platform -- policy needed due to logic contained in the vendor image,
// * mapping -- mapping policy which helps preserve forward-compatibility of non-platform policy
// with newer versions of platform policy.
//
// secilc is invoked to compile the above three policy files into a single monolithic policy
// file. This file is then loaded into the kernel.
// Load precompiled policy from vendor image, if a matching policy is found there. The policy
// must match the platform policy on the system image.
std::string precompiled_sepolicy_file;
if (selinux_find_precompiled_split_policy(&precompiled_sepolicy_file)) {
android::base::unique_fd fd(
open(precompiled_sepolicy_file.c_str(), O_RDONLY | O_CLOEXEC | O_BINARY));
if (fd != -1) {
if (selinux_android_load_policy_from_fd(fd, precompiled_sepolicy_file.c_str()) < 0) {
LOG(ERROR) << "Failed to load SELinux policy from " << precompiled_sepolicy_file;
return false;
}
return true;
}
}
// No suitable precompiled policy could be loaded
LOG(INFO) << "Compiling SELinux policy";
// Determine the highest policy language version supported by the kernel
set_selinuxmnt("/sys/fs/selinux");
int max_policy_version = security_policyvers();
if (max_policy_version == -1) {
PLOG(ERROR) << "Failed to determine highest policy version supported by kernel";
return false;
}
// We store the output of the compilation on /dev because this is the most convenient tmpfs
// storage mount available this early in the boot sequence.
char compiled_sepolicy[] = "/dev/sepolicy.XXXXXX";
android::base::unique_fd compiled_sepolicy_fd(mkostemp(compiled_sepolicy, O_CLOEXEC));
if (compiled_sepolicy_fd < 0) {
PLOG(ERROR) << "Failed to create temporary file " << compiled_sepolicy;
return false;
}
// Determine which mapping file to include
std::string vend_plat_vers;
if (!selinux_get_vendor_mapping_version(&vend_plat_vers)) {
return false;
}
std::string mapping_file("/system/etc/selinux/mapping/" + vend_plat_vers + ".cil");
// clang-format off
const char* compile_args[] = {
"/system/bin/secilc",
plat_policy_cil_file,
"-M", "true", "-G", "-N",
// Target the highest policy language version supported by the kernel
"-c", std::to_string(max_policy_version).c_str(),
mapping_file.c_str(),
"/vendor/etc/selinux/nonplat_sepolicy.cil",
"-o", compiled_sepolicy,
// We don't care about file_contexts output by the compiler
"-f", "/sys/fs/selinux/null", // /dev/null is not yet available
nullptr};
// clang-format on
if (!fork_execve_and_wait_for_completion(compile_args[0], (char**)compile_args, (char**)ENV)) {
unlink(compiled_sepolicy);
return false;
}
unlink(compiled_sepolicy);
LOG(INFO) << "Loading compiled SELinux policy";
if (selinux_android_load_policy_from_fd(compiled_sepolicy_fd, compiled_sepolicy) < 0) {
LOG(ERROR) << "Failed to load SELinux policy from " << compiled_sepolicy;
return false;
}
return true;
}
/*
* Loads SELinux policy from a monolithic file.
*
* Returns true upon success, false otherwise (failure cause is logged).
*/
static bool selinux_load_monolithic_policy() {
LOG(VERBOSE) << "Loading SELinux policy from monolithic file";
if (selinux_android_load_policy() < 0) {
PLOG(ERROR) << "Failed to load monolithic SELinux policy";
return false;
}
return true;
}
/*
* Loads SELinux policy into the kernel.
*
* Returns true upon success, false otherwise (failure cause is logged).
*/
static bool selinux_load_policy() {
return selinux_is_split_policy_device() ? selinux_load_split_policy()
: selinux_load_monolithic_policy();
}
static void selinux_initialize(bool in_kernel_domain) {
Timer t;
selinux_callback cb;
cb.func_log = selinux_klog_callback;
selinux_set_callback(SELINUX_CB_LOG, cb);
cb.func_audit = audit_callback;
selinux_set_callback(SELINUX_CB_AUDIT, cb);
if (in_kernel_domain) {
LOG(INFO) << "Loading SELinux policy";
if (!selinux_load_policy()) {
panic();
}
bool kernel_enforcing = (security_getenforce() == 1);
bool is_enforcing = selinux_is_enforcing();
if (kernel_enforcing != is_enforcing) {
if (security_setenforce(is_enforcing)) {
PLOG(ERROR) << "security_setenforce(%s) failed" << (is_enforcing ? "true" : "false");
security_failure();
}
}
if (!write_file("/sys/fs/selinux/checkreqprot", "0")) {
security_failure();
}
// init's first stage can't set properties, so pass the time to the second stage.
setenv("INIT_SELINUX_TOOK", std::to_string(t.duration_ms()).c_str(), 1);
} else {
selinux_init_all_handles();
}
}
// The files and directories that were created before initial sepolicy load
// need to have their security context restored to the proper value.
// This must happen before /dev is populated by ueventd.
static void selinux_restore_context() {
LOG(INFO) << "Running restorecon...";
restorecon("/dev");
restorecon("/dev/kmsg");
restorecon("/dev/socket");
restorecon("/dev/random");
restorecon("/dev/urandom");
restorecon("/dev/__properties__");
restorecon("/file_contexts.bin");
restorecon("/plat_file_contexts");
restorecon("/nonplat_file_contexts");
restorecon("/plat_property_contexts");
restorecon("/nonplat_property_contexts");
restorecon("/plat_seapp_contexts");
restorecon("/nonplat_seapp_contexts");
restorecon("/plat_service_contexts");
restorecon("/nonplat_service_contexts");
restorecon("/plat_hwservice_contexts");
restorecon("/nonplat_hwservice_contexts");
restorecon("/sepolicy");
restorecon("/vndservice_contexts");
restorecon("/sys", SELINUX_ANDROID_RESTORECON_RECURSE);
restorecon("/dev/block", SELINUX_ANDROID_RESTORECON_RECURSE);
restorecon("/dev/device-mapper");
}
// Set the UDC controller for the ConfigFS USB Gadgets.
// Read the UDC controller in use from "/sys/class/udc".
// In case of multiple UDC controllers select the first one.
static void set_usb_controller() {
std::unique_ptr<DIR, decltype(&closedir)>dir(opendir("/sys/class/udc"), closedir);
if (!dir) return;
dirent* dp;
while ((dp = readdir(dir.get())) != nullptr) {
if (dp->d_name[0] == '.') continue;
property_set("sys.usb.controller", dp->d_name);
break;
}
}
static void install_reboot_signal_handlers() {
// Instead of panic'ing the kernel as is the default behavior when init crashes,
// we prefer to reboot to bootloader on development builds, as this will prevent
// boot looping bad configurations and allow both developers and test farms to easily
// recover.
struct sigaction action;
memset(&action, 0, sizeof(action));
sigfillset(&action.sa_mask);
action.sa_handler = [](int) {
// panic() reboots to bootloader
panic();
};
action.sa_flags = SA_RESTART;
sigaction(SIGABRT, &action, nullptr);
sigaction(SIGBUS, &action, nullptr);
sigaction(SIGFPE, &action, nullptr);
sigaction(SIGILL, &action, nullptr);
sigaction(SIGSEGV, &action, nullptr);
#if defined(SIGSTKFLT)
sigaction(SIGSTKFLT, &action, nullptr);
#endif
sigaction(SIGSYS, &action, nullptr);
sigaction(SIGTRAP, &action, nullptr);
}
int main(int argc, char** argv) {
if (!strcmp(basename(argv[0]), "ueventd")) {
return ueventd_main(argc, argv);
}
if (!strcmp(basename(argv[0]), "watchdogd")) {
return watchdogd_main(argc, argv);
}
if (REBOOT_BOOTLOADER_ON_PANIC) { //用于在系统发生严重错误(如 panic)时重新启动引导加载程序(bootloader)
install_reboot_signal_handlers();
}
add_environment("PATH", _PATH_DEFPATH);
bool is_first_stage = (getenv("INIT_SECOND_STAGE") == nullptr);
if (is_first_stage) {
boot_clock::time_point start_time = boot_clock::now();
// Clear the umask.
umask(0);
// Get the basic filesystem setup we need put together in the initramdisk
// on / and then we'll let the rc file figure out the rest.
//创建和挂在启动所需的文件目录
mount("tmpfs", "/dev", "tmpfs", MS_NOSUID, "mode=0755");
mkdir("/dev/pts", 0755);
mkdir("/dev/socket", 0755);
mount("devpts", "/dev/pts", "devpts", 0, NULL);
#define MAKE_STR(x) __STRING(x)
mount("proc", "/proc", "proc", 0, "hidepid=2,gid=" MAKE_STR(AID_READPROC));
// Don't expose the raw commandline to unprivileged processes.
chmod("/proc/cmdline", 0440);
gid_t groups[] = { AID_READPROC };
setgroups(arraysize(groups), groups);
mount("sysfs", "/sys", "sysfs", 0, NULL);
mount("selinuxfs", "/sys/fs/selinux", "selinuxfs", 0, NULL);
mknod("/dev/kmsg", S_IFCHR | 0600, makedev(1, 11));
mknod("/dev/random", S_IFCHR | 0666, makedev(1, 8));
mknod("/dev/urandom", S_IFCHR | 0666, makedev(1, 9));
// Now that tmpfs is mounted on /dev and we have /dev/kmsg, we can actually
// talk to the outside world...
//初始化kernel的log 这样可以从外界获取kernellog了
InitKernelLogging(argv);
LOG(INFO) << "init first stage started!";
if (!DoFirstStageMount()) {
LOG(ERROR) << "Failed to mount required partitions early ...";
panic();
}
SetInitAvbVersionInRecovery();
// Set up SELinux, loading the SELinux policy.
selinux_initialize(true);
// We're in the kernel domain, so re-exec init to transition to the init domain now
// that the SELinux policy has been loaded.
if (restorecon("/init") == -1) {
PLOG(ERROR) << "restorecon failed";
security_failure();
}
setenv("INIT_SECOND_STAGE", "true", 1);
static constexpr uint32_t kNanosecondsPerMillisecond = 1e6;
uint64_t start_ms = start_time.time_since_epoch().count() / kNanosecondsPerMillisecond;
setenv("INIT_STARTED_AT", StringPrintf("%" PRIu64, start_ms).c_str(), 1);
char* path = argv[0];
char* args[] = { path, nullptr };
execv(path, args);
// execv() only returns if an error happened, in which case we
// panic and never fall through this conditional.
PLOG(ERROR) << "execv(\"" << path << "\") failed";
security_failure();
}
// At this point we're in the second stage of init.
InitKernelLogging(argv);
LOG(INFO) << "init second stage started!";
// Set up a session keyring that all processes will have access to. It
// will hold things like FBE encryption keys. No process should override
// its session keyring.
keyctl(KEYCTL_GET_KEYRING_ID, KEY_SPEC_SESSION_KEYRING, 1);
// Indicate that booting is in progress to background fw loaders, etc.
close(open("/dev/.booting", O_WRONLY | O_CREAT | O_CLOEXEC, 0000));
//属性初始化
property_init();
// If arguments are passed both on the command line and in DT,
// properties set in DT always have priority over the command-line ones.
process_kernel_dt();
process_kernel_cmdline();
// Propagate the kernel variables to internal variables
// used by init as well as the current required properties.
export_kernel_boot_props();
// Make the time that init started available for bootstat to log.
property_set("ro.boottime.init", getenv("INIT_STARTED_AT"));
property_set("ro.boottime.init.selinux", getenv("INIT_SELINUX_TOOK"));
// Set libavb version for Framework-only OTA match in Treble build.
const char* avb_version = getenv("INIT_AVB_VERSION");
if (avb_version) property_set("ro.boot.avb_version", avb_version);
// Clean up our environment.
unsetenv("INIT_SECOND_STAGE");
unsetenv("INIT_STARTED_AT");
unsetenv("INIT_SELINUX_TOOK");
unsetenv("INIT_AVB_VERSION");
// Now set up SELinux for second stage.
selinux_initialize(false);
selinux_restore_context();
//epoll句柄的创建
epoll_fd = epoll_create1(EPOLL_CLOEXEC);
if (epoll_fd == -1) {
PLOG(ERROR) << "epoll_create1 failed";
exit(1);
}
//设置子进程处理信号 如果子进程zygote异常退出 会调用设定的信号处理函数处理
signal_handler_init();
property_load_boot_defaults();
export_oem_lock_status();
//启动属性服务
start_property_service();
set_usb_controller();
const BuiltinFunctionMap function_map;
Action::set_function_map(&function_map);
Parser& parser = Parser::GetInstance();
parser.AddSectionParser("service",std::make_unique<ServiceParser>());
parser.AddSectionParser("on", std::make_unique<ActionParser>());
parser.AddSectionParser("import", std::make_unique<ImportParser>());
std::string bootscript = GetProperty("ro.boot.init_rc", "");
if (bootscript.empty()) {
//解析init.rc 就是上面讲到的
parser.ParseConfig("/init.rc");
parser.set_is_system_etc_init_loaded(
parser.ParseConfig("/system/etc/init"));
parser.set_is_vendor_etc_init_loaded(
parser.ParseConfig("/vendor/etc/init"));
parser.set_is_odm_etc_init_loaded(parser.ParseConfig("/odm/etc/init"));
} else {
parser.ParseConfig(bootscript);
parser.set_is_system_etc_init_loaded(true);
parser.set_is_vendor_etc_init_loaded(true);
parser.set_is_odm_etc_init_loaded(true);
}
// Turning this on and letting the INFO logging be discarded adds 0.2s to
// Nexus 9 boot time, so it's disabled by default.
if (false) parser.DumpState();
ActionManager& am = ActionManager::GetInstance();
am.QueueEventTrigger("early-init");
// Queue an action that waits for coldboot done so we know ueventd has set up all of /dev...
am.QueueBuiltinAction(wait_for_coldboot_done_action, "wait_for_coldboot_done");
// ... so that we can start queuing up actions that require stuff from /dev.
am.QueueBuiltinAction(mix_hwrng_into_linux_rng_action, "mix_hwrng_into_linux_rng");
am.QueueBuiltinAction(set_mmap_rnd_bits_action, "set_mmap_rnd_bits");
am.QueueBuiltinAction(set_kptr_restrict_action, "set_kptr_restrict");
am.QueueBuiltinAction(keychord_init_action, "keychord_init");
am.QueueBuiltinAction(console_init_action, "console_init");
// Trigger all the boot actions to get us started.
am.QueueEventTrigger("init");
// Repeat mix_hwrng_into_linux_rng in case /dev/hw_random or /dev/random
// wasn't ready immediately after wait_for_coldboot_done
am.QueueBuiltinAction(mix_hwrng_into_linux_rng_action, "mix_hwrng_into_linux_rng");
// Don't mount filesystems or start core system services in charger mode.
std::string bootmode = GetProperty("ro.bootmode", "");
if (bootmode == "charger") {
am.QueueEventTrigger("charger");
} else {
am.QueueEventTrigger("late-init");
}
// Run all property triggers based on current state of the properties.
am.QueueBuiltinAction(queue_property_triggers_action, "queue_property_triggers");
while (true) {
// By default, sleep until something happens.
int epoll_timeout_ms = -1;
if (!(waiting_for_prop || ServiceManager::GetInstance().IsWaitingForExec())) {
am.ExecuteOneCommand();
}
if (!(waiting_for_prop || ServiceManager::GetInstance().IsWaitingForExec())) {
restart_processes();
// If there's a process that needs restarting, wake up in time for that.
if (process_needs_restart_at != 0) {
epoll_timeout_ms = (process_needs_restart_at - time(nullptr)) * 1000;
if (epoll_timeout_ms < 0) epoll_timeout_ms = 0;
}
// If there's more work to do, wake up again immediately.
if (am.HasMoreCommands()) epoll_timeout_ms = 0;
}
epoll_event ev;
int nr = TEMP_FAILURE_RETRY(epoll_wait(epoll_fd, &ev, 1, epoll_timeout_ms));
if (nr == -1) {
PLOG(ERROR) << "epoll_wait failed";
} else if (nr == 1) {
((void (*)()) ev.data.ptr)();
}
}
return 0;
}
我们只需关注主要的几点就可以了。
- 在开始的时候创建和挂载启动所需的文件目录,其中挂载了tmpfs、devpts、proc、sysfs和selinuxfs共5种文件系统,这些都是系统运行时目录,顾名思义,只在系统运行时才会存在,系统停止时会消失。
- property_init函数来对属性进行初始化,并在注释3处调用start_property_service函数启动属性服务
- signal_handler_init 函数用于设置子进程信号处理函数,它被定义在system/core/init/signal_handler.cpp中,主要用于防止init进程的子进程成为僵尸进程,为了防止僵尸进程的出现,系统会在子进程暂停和终止的时候发出SIGCHLD信号,而signal_handler_init函数就是用来接收SIGCHLD信号的(其内部只处理进程终止的SIGCHLD信号)。
解析init.rc
代码很长
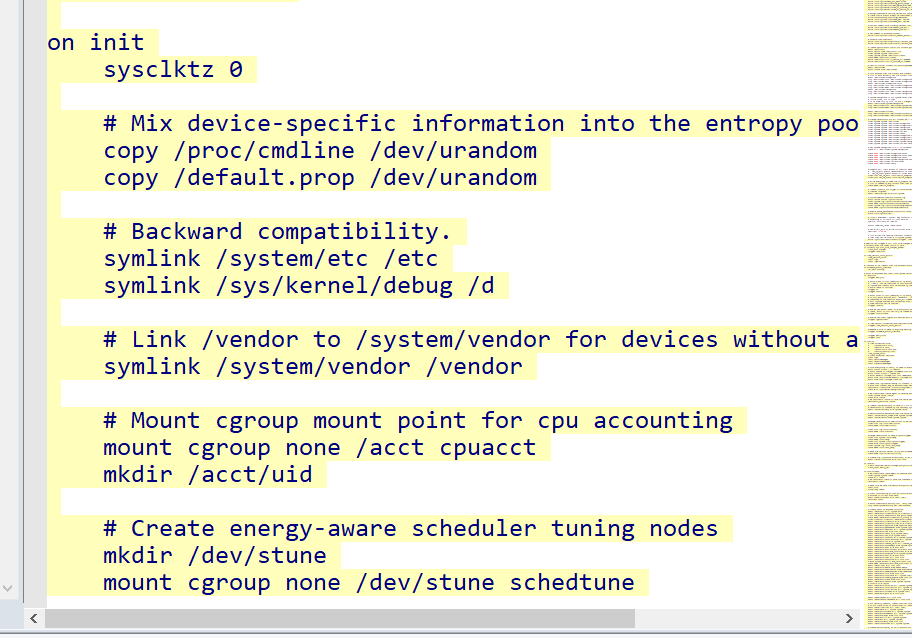
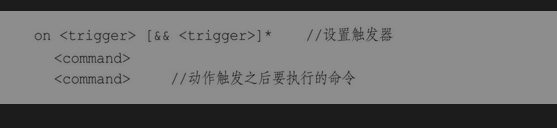
on init是action类型语句
创建zygote涉及service语句

这里Android 8.0中对init.rc文件进行了拆分,每个服务对应一个rc文件。我们要分析的Zygote启动脚本则在init.zygoteXX.rc中定义 我们找到zygote64对应的
service zygote /system/bin/app_process64 -Xzygote /system/bin --zygote --start-system-server
class main
priority -20
user root
group root readproc
socket zygote stream 660 root system
onrestart write /sys/android_power/request_state wake
onrestart write /sys/power/state on
onrestart restart audioserver
onrestart restart cameraserver
onrestart restart media
onrestart restart netd
onrestart restart wificond
writepid /dev/cpuset/foreground/tasks
Service 用于通知init进程创建名为zygote的进程,这个进程执行程序的路径为/system/bin/app_process64①,其后面的代码是要传给app_process64的参数。
class main是zygote的classname为main
解析service类型语句
Action类型语句采用ActionParser来进行解析,Service 类型语句采用ServiceParser来进行解析
会用到两个函数:一个是ParseSection,它会解析Service的rc文件,比如上文讲到的init.zygote64.rc,ParseSection函数主要用来搭建Service的架子;另一个是ParseLineSection,用于解析子项。
ParseSection
bool ServiceParser::ParseSection(const std::vector<std::string>& args,
std::string* err) {
if (args.size() < 3) { 判断service是否有name与可执行程序
*err = "services must have a name and a program";
return false;
}
const std::string& name = args[1];
if (!IsValidName(name)) { 看name是覅否有效
*err = StringPrintf("invalid service name '%s'", name.c_str());
return false;
}
std::vector<std::string> str_args(args.begin() + 2, args.end());
service_ = std::make_unique<Service>(name, str_args);都行的化构造一个service对象 classname为default
return true;
}
ParseLineSection 解析子项
bool ServiceParser::ParseLineSection(const std::vector<std::string>& args,
const std::string& filename, int line,
std::string* err) const {
return service_ ? service_->ParseLine(args, err) : false;
}
解析完数据之后调用endsection 这里面调用了一个AddService 感觉像是添加了一个什么服务 看看
void ServiceParser::EndSection() {
if (service_) {
ServiceManager::GetInstance().AddService(std::move(service_));
}
}
addservice
void ServiceManager::AddService(std::unique_ptr<Service> service) {
Service* old_service = FindServiceByName(service->name());
if (old_service) {
LOG(ERROR) << "ignored duplicate definition of service '" << service->name() << "'";
return;
}
services_.emplace_back(std::move(service)); 将Service对象加入Service链表中 然后根据选项域的内容填充Service对象
}
init启动Zygote
讲完service 下面就是具体怎么启动zygote了
Zygote 的classname 为main Zygote 的classname 为main
class_start是一个COMMAND,对应的函数为do_class_start。注释1处启动那些classname为main的Service,而zygote的classname就是main
do_class_start 具体就是同个这个函数取拉起main 也就是zygote的
static int do_class_start(const std::vector<std::string>& args) {
/* Starting a class does not start services
* which are explicitly disabled. They must
* be started individually.
*/
ServiceManager::GetInstance().
ForEachServiceInClass(args[1], [] (Service* s) { s->StartIfNotDisabled(); }); 遍历Service链表,找到classname为main的Zygote,并执行StartIfNotDisabled函数
return 0;
}
而StartIfNotDisabled
bool Service::StartIfNotDisabled() {
if (!(flags_ & SVC_DISABLED)) { 这玩意是对应rc文件会设置好的 如果没有设置,就会调用Start来启动这个service
return Start();
} else {
flags_ |= SVC_DISABLED_START;
}
return true;
}
start 很长一个
{
// Starting a service removes it from the disabled or reset state and
// immediately takes it out of the restarting state if it was in there.
flags_ &= (~(SVC_DISABLED|SVC_RESTARTING|SVC_RESET|SVC_RESTART|SVC_DISABLED_START));
// Running processes require no additional work --- if they're in the
// process of exiting, we've ensured that they will immediately restart
// on exit, unless they are ONESHOT.
看看是否已经启动了
if (flags_ & SVC_RUNNING) {
return false;
}
bool needs_console = (flags_ & SVC_CONSOLE);
if (needs_console) {
if (console_.empty()) {
console_ = default_console;
}
// Make sure that open call succeeds to ensure a console driver is
// properly registered for the device node
int console_fd = open(console_.c_str(), O_RDWR | O_CLOEXEC);
if (console_fd < 0) {
PLOG(ERROR) << "service '" << name_ << "' couldn't open console '" << console_ << "'";
flags_ |= SVC_DISABLED;
return false;
}
close(console_fd);
}
判断启动的service的执行文件是否存在 如果不存在就不启动了
struct stat sb;
if (stat(args_[0].c_str(), &sb) == -1) {
PLOG(ERROR) << "cannot find '" << args_[0] << "', disabling '" << name_ << "'";
flags_ |= SVC_DISABLED;
return false;
}
std::string scon;
if (!seclabel_.empty()) {
scon = seclabel_;
} else {
LOG(INFO) << "computing context for service '" << name_ << "'";
scon = ComputeContextFromExecutable(name_, args_[0]);
if (scon == "") {
return false;
}
}
LOG(INFO) << "starting service '" << name_ << "'...";
判断子进程有没有启动 没有启动就fork创建子进程
pid_t pid = -1;
if (namespace_flags_) {
pid = clone(nullptr, nullptr, namespace_flags_ | SIGCHLD, nullptr);
} else {
pid = fork();
}
代码逻辑在子进程当中运行了
if (pid == 0) {
umask(077);
if (namespace_flags_ & CLONE_NEWPID) {
// This will fork again to run an init process inside the PID
// namespace.
SetUpPidNamespace(name_);
}
for (const auto& ei : envvars_) {
add_environment(ei.name.c_str(), ei.value.c_str());
}
std::for_each(descriptors_.begin(), descriptors_.end(),
std::bind(&DescriptorInfo::CreateAndPublish, std::placeholders::_1, scon));
// See if there were "writepid" instructions to write to files under /dev/cpuset/.
auto cpuset_predicate = [](const std::string& path) {
return android::base::StartsWith(path, "/dev/cpuset/");
};
auto iter = std::find_if(writepid_files_.begin(), writepid_files_.end(), cpuset_predicate);
if (iter == writepid_files_.end()) {
// There were no "writepid" instructions for cpusets, check if the system default
// cpuset is specified to be used for the process.
std::string default_cpuset = android::base::GetProperty("ro.cpuset.default", "");
if (!default_cpuset.empty()) {
// Make sure the cpuset name starts and ends with '/'.
// A single '/' means the 'root' cpuset.
if (default_cpuset.front() != '/') {
default_cpuset.insert(0, 1, '/');
}
if (default_cpuset.back() != '/') {
default_cpuset.push_back('/');
}
writepid_files_.push_back(
StringPrintf("/dev/cpuset%stasks", default_cpuset.c_str()));
}
}
std::string pid_str = StringPrintf("%d", getpid());
for (const auto& file : writepid_files_) {
if (!WriteStringToFile(pid_str, file)) {
PLOG(ERROR) << "couldn't write " << pid_str << " to " << file;
}
}
if (ioprio_class_ != IoSchedClass_NONE) {
if (android_set_ioprio(getpid(), ioprio_class_, ioprio_pri_)) {
PLOG(ERROR) << "failed to set pid " << getpid()
<< " ioprio=" << ioprio_class_ << "," << ioprio_pri_;
}
}
if (needs_console) {
setsid();
OpenConsole();
} else {
ZapStdio();
}
// As requested, set our gid, supplemental gids, uid, context, and
// priority. Aborts on failure.
SetProcessAttributes();
std::vector<char*> strs;
ExpandArgs(args_, &strs);
调用execve service就会启动了
if (execve(strs[0], (char**) &strs[0], (char**) ENV) < 0) {
PLOG(ERROR) << "cannot execve('" << strs[0] << "')";
}
_exit(127);
}
if (pid < 0) {
PLOG(ERROR) << "failed to fork for '" << name_ << "'";
pid_ = 0;
return false;
}
if (oom_score_adjust_ != -1000) {
std::string oom_str = StringPrintf("%d", oom_score_adjust_);
std::string oom_file = StringPrintf("/proc/%d/oom_score_adj", pid);
if (!WriteStringToFile(oom_str, oom_file)) {
PLOG(ERROR) << "couldn't write oom_score_adj: " << strerror(errno);
}
}
time_started_ = boot_clock::now();
pid_ = pid;
flags_ |= SVC_RUNNING;
errno = -createProcessGroup(uid_, pid_);
if (errno != 0) {
PLOG(ERROR) << "createProcessGroup(" << uid_ << ", " << pid_ << ") failed for service '"
<< name_ << "'";
}
if ((flags_ & SVC_EXEC) != 0) {
LOG(INFO) << android::base::StringPrintf(
"SVC_EXEC pid %d (uid %d gid %d+%zu context %s) started; waiting...", pid_, uid_, gid_,
supp_gids_.size(), !seclabel_.empty() ? seclabel_.c_str() : "default");
}
NotifyStateChange("running");
return true;
}
首先判断Service是否已经运行,如果运行则不再启动,直接返回false。如果程序走到注释1处,说明子进程还没有被启动,就调用fork函数创建子进程,并返回pid值,注释2处如果pid值为0,则说明当前代码逻辑在子进程中运行。注释3处在子进程中调用execve函数,Service子进程就会被启动,并进入该Service的main函数中,如果该Service是Zygote,从2.1.3节末段的标注①处我们可知Zygote执行程序的路径为/system/bin/app_process64,对应的文件为app_main.cpp,这样就会进入app_main.cpp的main函数中
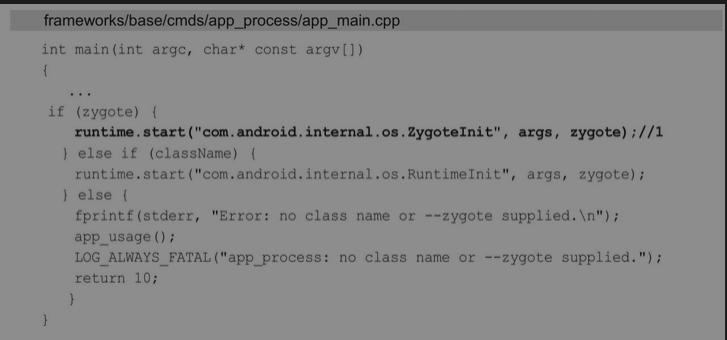
这部分代码也很长
关键部分如下 注释1处的代码可以得知调用runtime的start函数启动Zygote,至此Zygote就启动了。
至此我们梳理一下
就是init.rc里面的class_start通过调用各种函数启动的zygote
属性服务
这玩意类似于一个注册表,注册表的内容采用键值对的形式来记录用户、软件的一些使用信息。
init进程启动时会启动属性服务,并为其分配内存,用来存储这些属性,如果需要这些属性直接读取就可以了
就是这两行代码
属性服务初始化与启动
来看看第一个
void property_init() {
if (__system_property_area_init()) {
LOG(ERROR) << "Failed to initialize property area";
exit(1);
}
}
就调用了__system_property_area_init 不需要太关注 主要是初始化用
接下来看看start poperty service
void start_property_service() {
property_set("ro.property_service.version", "2");
property_set_fd = create_socket(PROP_SERVICE_NAME, SOCK_STREAM | SOCK_CLOEXEC | SOCK_NONBLOCK,
0666, 0, 0, NULL);创建非阻塞socket
if (property_set_fd == -1) {
PLOG(ERROR) << "start_property_service socket creation failed";
exit(1);
}
listen(property_set_fd, 8);调用listen函数对property_set_fd进行监听,这样创建的Socket就成为server,也就是属性服务
register_epoll_handler(property_set_fd, handle_property_set_fd);将property_set_fd放入了epoll中,用epoll来监听property_set_fd:当property_set_fd中有数据到来时,init进程将调用handle_property_set_fd函数进行处理
}
epoll是Linux内核为处理大批量文件描述符而做了改进的poll,是Linux下多路复用I/O接口select/poll的增强版本
服务处理客户端请求
里面关键是handle_property_set 涉及进一步封装
handle_property_set进行属性的检查
一种是普通属性;还有一种是控制属性,控制属性用来执行一些命令,比如开机的动画就使用了这种属性。
总结
init进程启动做了很多的工作,总的来说主要做了以下三件事:(1)创建和挂载启动所需的文件目录。(2)初始化和启动属性服务。(3)解析init.rc配置文件并启动Zygote进程。